3175x175(CURRENT).thumb.jpg.b05acc060982b36f5891ba728e6d953c.jpg)

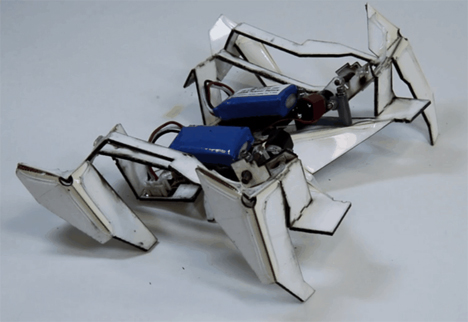
University of Washington scientists have built a battery-free flying robot that stabilizes its descent by changing shape in mid-air—a design that was inspired by origami, according to a recent paper published in the journal Science Robotics. These microfliers weigh just 400 milligrams, and if there's a nice light breeze, they can travel the length of a football field when dropped by a drone from an altitude of 40 meters (131 feet).
Miniature robotics is a very active area of research. For instance, earlier this year, we reported on how engineers built a soft robot in the shape of a Lego minifig. The robot changes shape by "melting" into liquid form in response to a magnetic field, oozing between the bars of its cage before re-solidifying on the other side—just like the T-1000 in Terminator 2: Judgment Day. That robot belongs to a class known as magnetically actuated miniature machines, typically made of soft polymers (like elastomers or hydrogels) embedded with ferromagnetic particles that have programmed magnetization profiles. These kinds of robots can swim, climb, roll, walk, and jump, as well as change their shape simply by altering the corresponding magnetic field.
As for flying robots, back in 2017, we reported on Dutch scientists who built a flying robot capable of executing the impressive aerodynamic feats flying insects like bees, dragonflies, and fruit flies, particularly when said insects seek to evade predators or the swatting motion of a human hand. Even though the robot was much larger than the average insect, it could hover and fly in any direction (up, down, forward, backward, and sideways), as well as perform banked turns and 360-degree flips, akin to loops or barrel rolls. It also boasted excellent power efficiency, capable of hovering for five minutes or flying more than a kilometer on a single charge.
This latest endeavor combines both flying and shape-changing capabilities in a tiny microflyer. The UW team was particularly interested in building a battery-free microflyer that could be dispersed in batches by drones, falling to the ground and spreading much like the seeds and leaves of plants. "This ability to disperse in the wind without active propulsion is useful for designing wind-dispersed micro fliers," the authors wrote, noting that such devices would be smaller and lighter than drones. "Equipped with sensors, such microfliers could automate the deployment of large-scale wireless sensor networks for environmental monitoring."
However, achieving both actuation and control on such microfliers usually requires incorporating an onboard actuation mechanism, onboard sensing, and/or computational capabilities for control, all of which can add considerable weight to the resulting robot, per the authors. For instance, there have been prior designs for such robots featuring fixed-wing gliders to control descent, as well as designs inspired by plants with spinning seeds. The tradeoffs were large motors that consumed a lot of energy and required heavy batteries, resulting in larger and heavier robots.
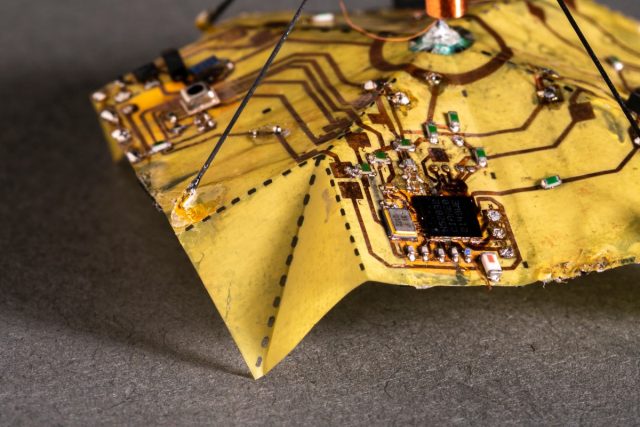
The UW microfliers are designed to carry tiny onboard sensors to monitor temperature, humidity, and other environmental conditions. They feature onboard solar-powered battery-free actuators, a circuit that harvests the needed solar power, and a controller to trigger the shape-changing. The team used a Miura-ori origami fold that occurs in leaves. "The Miura-ori pattern is a form of rigid origami, meaning that the faces of the structure will not contort during folding and the deformations only occur along defined crease lines," the authors wrote. This saves on energy requirements, and the lack of deformation on the structure's faces makes it easy to attach electronic components and solar cells on those faces.

Recommended Comments
There are no comments to display.
Join the conversation
You can post now and register later. If you have an account, sign in now to post with your account.
Note: Your post will require moderator approval before it will be visible.