3175x175(CURRENT).thumb.jpg.b05acc060982b36f5891ba728e6d953c.jpg)
Sending 1 kilogram to Mars will set you back roughly $2.4 million, judging by the cost of the Perseverance mission. If you want to pack up supplies and gear for every conceivable contingency, you’re going to need a lot of those kilograms.
But what if you skipped almost all that weight and only took a do-it-all Swiss Army knife instead? That’s exactly what scientists at NASA Ames Research Center and Stanford University are testing with robots, algorithms, and highly advanced building materials.
Zero mass exploration
“The concept of zero mass exploration is rooted in self-replicating machines, an engineering concept John von Neumann conceived in the 1940s”, says Kenneth C. Cheung, a NASA Ames researcher. He was involved in the new study published recently in Science Robotics covering self-reprogrammable metamaterials—materials that do not exist in nature and have the ability to change their configuration on their own. “It’s the idea that an engineering system can not only replicate, but sustain itself in the environment,” he adds.
Based on this concept, Robert A. Freitas Jr. in the 1980s proposed a self-replicating interstellar spacecraft called the Von Neumann probe that would visit a nearby star system, find resources to build a copy of itself, and send this copy to another star system. Rinse and repeat.
“The technology of reprogrammable metamaterials [has] advanced to the point where we can start thinking about things like that. It can’t make everything we need yet, but it can make a really big chunk of what we need,” says Christine E. Gregg, a NASA Ames researcher and the lead author of the study.
Building blocks for space
One of the key problems with Von Neumann probes was that taking elements found in the soil on alien worlds and processing them into actual engineering components was resource-intensive and required huge amounts of energy. The NASA Ames team solved that with using prefabricated "voxels”—standardized reconfigurable building blocks.
The system derives its operating principles from the way nature works on a very fundamental level. “Think how biology, one of the most scalable systems we have ever seen, builds stuff," says Gregg. “It does that with building blocks. There are on the order of 20 amino acids which your body uses to make proteins to make 200 different types of cells and then combines trillions of those cells to make organs as complex as my hair and my eyes. We are using the same strategy,” she adds.
To demo this technology, they built a set of 256 of those blocks—extremely strong 3D structures made with a carbon-fiber-reinforced polymer called StattechNN-40CF. Each block had fastening interfaces on every side that could be used to reversibly attach them to other blocks and form a strong truss structure.
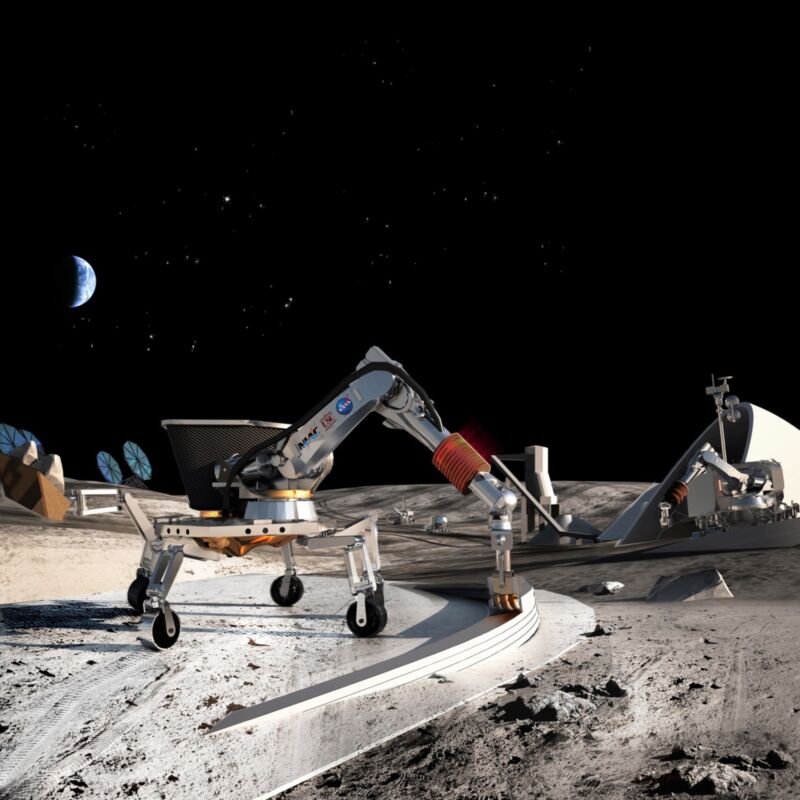
A 3×3 truss structure made with these voxels had an average failure load of 900 Newtons, which means it could hold over 90 kilograms despite being incredibly light itself (its density is just 0.0103 grams per cubic centimeter). “We took these voxels out in backpacks and built a boat, a shelter, a bridge you could walk on. The backpacks weighed around 18 kilograms. Without technology like that, you wouldn’t even think about fitting a boat and a bridge in a backpack,” says Cheung. “But the big thing about this study is that we implemented this reconfigurable system autonomously with robots,” he adds.
Recommended Comments
There are no comments to display.
Join the conversation
You can post now and register later. If you have an account, sign in now to post with your account.
Note: Your post will require moderator approval before it will be visible.